目前碩士論文也是打算使用 Arduino 來搭建硬體,其中使用到了慣性測量單元 (IMU) -GY-521,搭載 MPU6050 的加速計與陀螺儀晶片。由於在 I2Cdevlib 中發現有包含 MPU6050 的函式庫,故決定採用該函式庫來進行開發。
I2Cdevlib 是一個開放原始碼的專案,裡頭提供許多微處理裝置的函式庫供使用。要安裝該函式庫只需要到其 Github 頁面將原始碼下載下來,並將其中 Arduino 資料夾內的內容通通放到 Arduino 工作目錄中的 libraries 資料夾中。
1
2
$ git clone https://github.com/jrowberg/i2cdevlib /tmp/i2cdevlib
$ mv /tmp/i2cdevlib/Arduino/* $Arduino/libraries/
接下來可以在 libraries/MPU6050/Examples/MPU6050_raw 中找到範例程式。裡頭有兩個範例,以下僅示範 MPU6050_raw 的配置方式。
Hardware Wiring
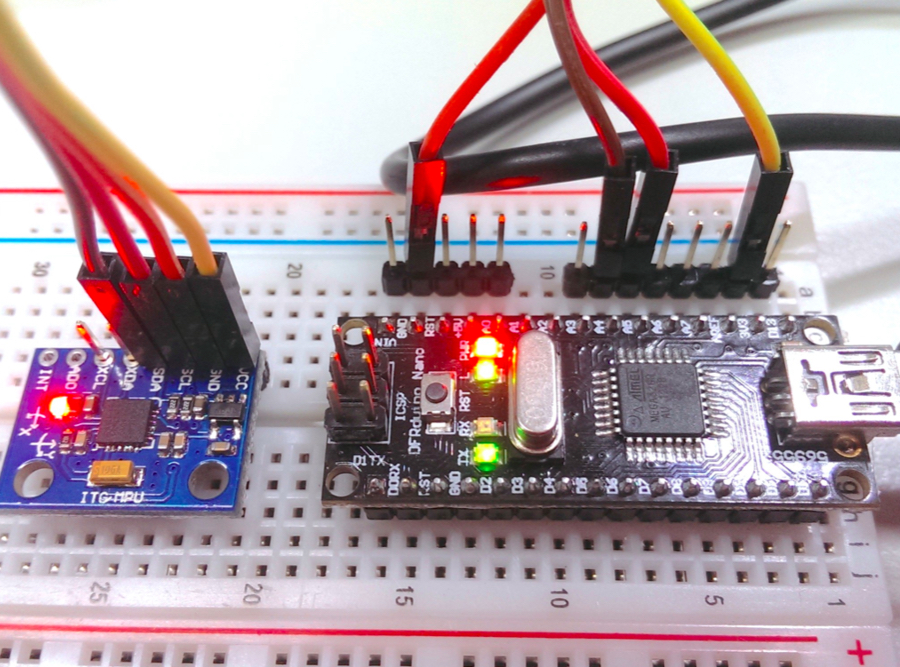
這邊僅需要四條杜邦線即可,連線方式如下:
| Board | wiring | GY-521 |
|---|---|---|
| 3.3V | ↔︎ | VCC |
| GND | ↔︎ | GND |
| A5 | ↔︎ | SCL |
| A4 | ↔︎ | SDA |
這樣接線的原因是 I2C 就是透過兩條線來進行通訊,分別是 SCL (clock rate) 與 SDA (data)。而在 Arduino Uno 這塊板子中,A5 剛好就是 SCL 線,A4 則是 SDA 現,所以直接這樣接就完成了。
另外,由於 I2C 的通訊是透過固定位址的,預設 MPU6050 透過 I2C 通訊時的位址是 0x68。如果需要改變這個位址的話,可以透過將 AD0 這接腳接到 3.3V 的電位,如此一來,該 MPU6050 的 I2C 的位址將更變為 0x69。
Software Configuration
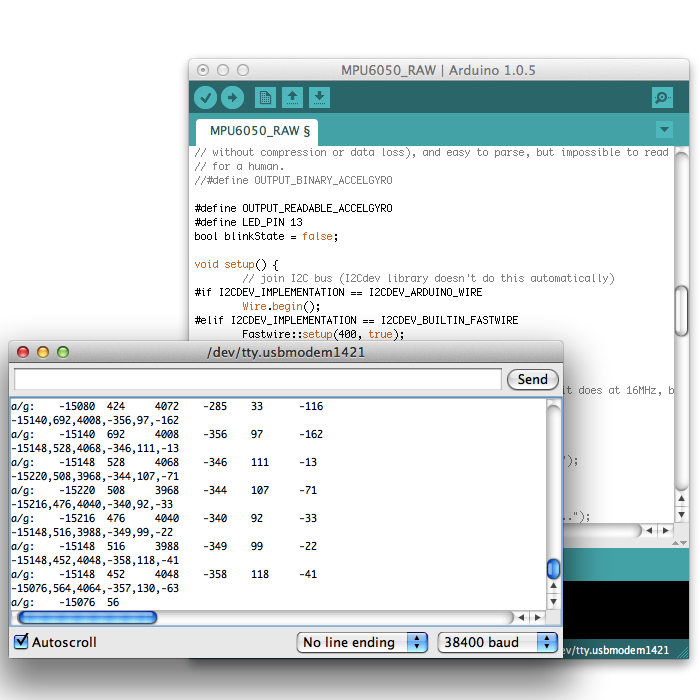
將整個 MPU6050_raw 資料夾複製出來到 Arduino 的工作目錄下,並用 Arduino IDE 開啟裡頭的 MPU6050_raw.ino 檔案。
選擇硬體規格與串列埠,即可以進行編譯與上傳。上傳完成後,Arduino 就會開始運行了,只要打開串列埠即可看到大量的訊號輸出。這時只要隨意地揮動 GY-521 這塊板子,就能發現輸出的訊號會有較明顯的改變。
使用 Ino 命令列工具
如果跟我一樣比較喜歡在 CLI 下工作的話,應該也會選擇使用 Ino 這個工具吧!關於如何設置 Arduino 的 CLI 環境可以參考這篇(連結)。然後,就會發現當輸入 ino build 時都會發生錯誤…
1
2
3
4
5
6
$ ino build
src/sketch.ino
.build/uno/src/sketch.cpp:2:20: error: I2Cdev.h: No such file or directory
.build/uno/src/sketch.cpp:3:21: error: MPU6050.h: No such file or directory
make: *** [.build/uno/src/sketch.d] Error 1
Make failed with code 2
這是因為 Ino 並不會去讀取 Arduino 預設工作目錄下的 libraries 資料夾的函式庫,僅會讀取當前目錄下的 lib 目錄下的函式庫。以這 MPU6050_raw 的範例來說,他額外需要 I2Cdevlib 與 MPU6050 這兩個函式庫。所以只要把這兩個函式庫的內容抓進 lib 目錄下即可成功編譯了! (P.S. 記得先 ino clean 再進行 ino build。)
不過我實在不喜歡電腦裡面有太多相同的東西,所以我都直接讓 lib 目錄連結到 Arduino 預設工作目錄下的 libraries 目錄。