目前碩論使用了加速計,遇到一個問題是要求出當前加速計的姿態,也就是要知道現在加速計對於地面的傾角。
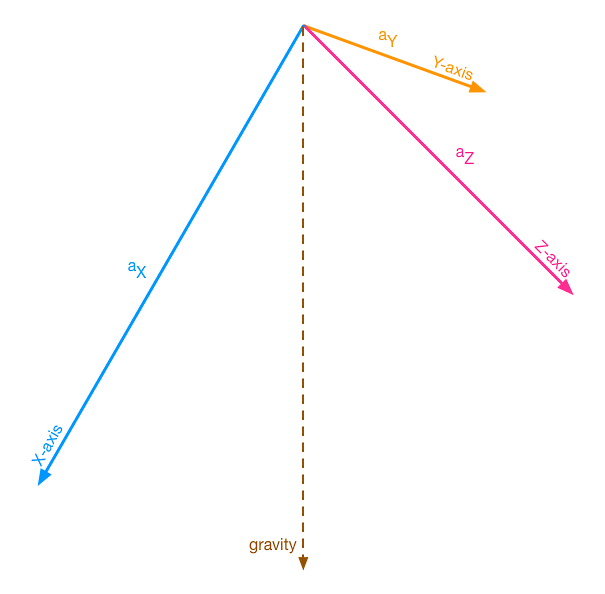
由於地球重力的影響,使得加速計無時無刻都受到重力的影響,並且將會根據姿態將其受力分到加速計中的 X 軸、Y 軸與 Z 軸。如下圖所示:
透過計算出當前姿態後,可以利用得到的傾角將加速計坐標系變換回現實坐標系。如下圖所示:
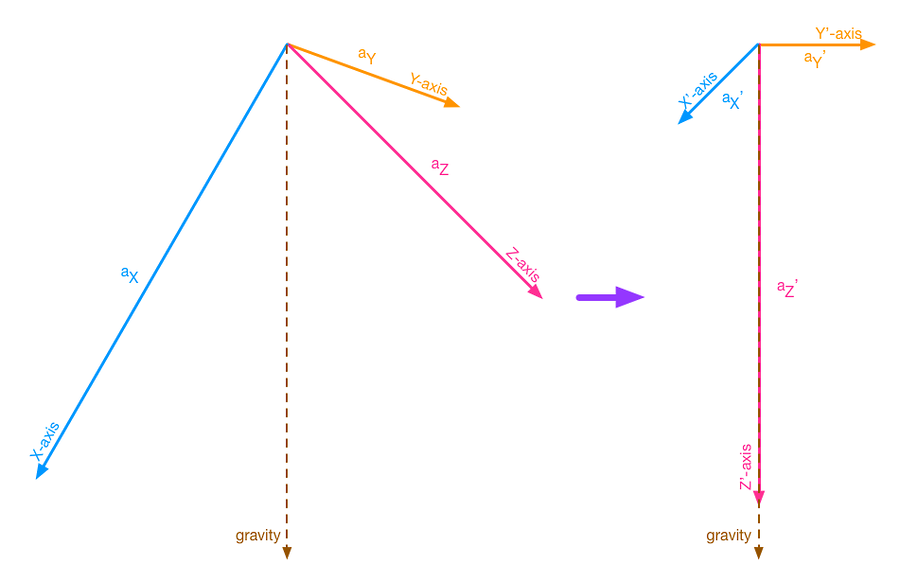
其中 Z’ 軸將與重力方向平行(與地表垂直),而 X’ 軸與 Y’ 軸將與地表平行(與重力方向垂直)。因此,aZ’ 將等於 1 (g) 與重力相等,而 aX’ 與 aY’ 將會等於 0。
要將加速度坐標系之 Z 軸對應到重力方向,需要進行兩次的旋轉,分別是對 X 軸旋轉以及對 Y 軸旋轉。所以接下來就是要求出用於對 X 軸旋轉之角度,以 roll angle 稱之並以 Φ 表示。以及對 Y 軸旋轉之角度,以 pitch angle 稱之並以 θ 表示。
Roll Angle (Φ)
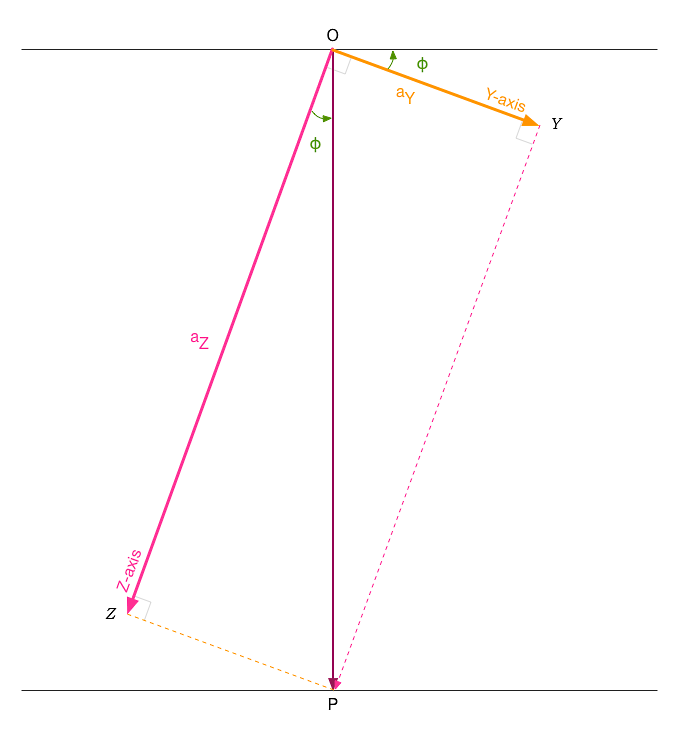
上圖為望向 YZ 平面之視圖,X 軸的正向即為眼睛往螢幕之方向。根據該圖,只要將整個坐標系沿著 X 軸逆時針旋轉 Φ 即可使得新 Y 軸(Y’ 軸)垂直於重力方向,令 Y 軸上的重力分量聚集到新 Z 軸(Z’ 軸)上。
至於 Φ 該如何求得?根據上圖,可以知道 ▱OYPZ 為一個矩形,因此 ZP 線段等於 OY 線段。可以算出 ∠ZOP 等於 tan-1(aY/aZ),也就是 Φ。
旋轉後,新的 Z 軸(Z’ 軸)上的分量將會是 √(aY2 + aZ2)。
Pitch Angle (θ)
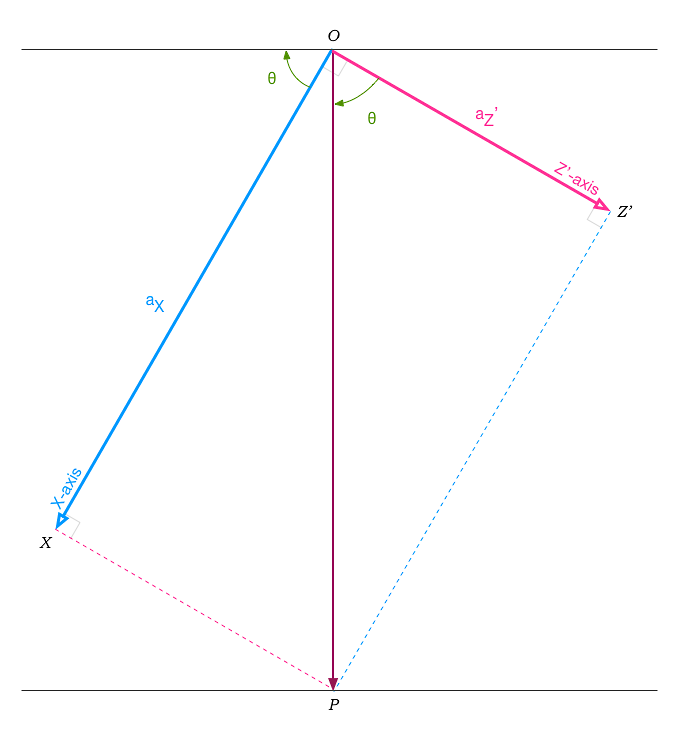
上圖為望向 XZ’ 平面之視圖,Y 軸的正向即為眼睛往螢幕之方向。同樣的只要將該坐標系沿著第一次旋轉後的新 Y 軸(Y’ 軸)順時針旋轉 θ 即可使得新 X 軸(X’ 軸)垂直於重力方向,令 X 軸上的重力分量積聚到新2 Z 軸(Z’’ 軸)。
求 θ 的方法同求 Φ 的方法,知道 ▱OZ’PX 為一個矩形,因此 PZ’ 線段等於 OX 線段。可以算出 ∠Z’OP 等於 tan-1(aX/aZ’),也就是 θ。此外根據第一次旋轉的結果,可以得知 aZ’ 等於 √(aY2 + aZ2),直接帶入計算即可。
旋轉過後的新2 Z 軸(Z’’ 軸)則剛好與重力方向重疊,因此其受力將會等於 1 (g)。
經過以上的計算,我們就可以得到加速計的姿態,並利用求得的角度將加速計坐標重新對應到現實坐標系上。